Helge Rhodin
Assistant Professor in Computer Science

UBC, Computer Science
201-2366 Main Mall
Vancouver, V6T 1Z4, Canada
Meet: Free-busy calendar
Office: CITEC 3.225
E-mail: rhodin@cs.ubc.ca
News: I started as a full professor at Bielefeld University in March 2024.
I am a Professor at Bielefeld University and affiliate at UBC, working towards non-intrusive computer-human interaction by advancing
3D computer vision, machine learning, computer graphics, and augmented reality.
The latest VR and AR devices offer incredible display capabilities; my contributions complement them by enabling high-quality dynamic reconstructions of our everyday environment from plain video input.
Before I was an Assistant Professor at UBC, a postdoctoral researcher at EPFL, and PhD candidate in the GVV group of Christian Theobalt at the Max-Plack-Institute for Informatics (see Linkedin timeline).
If you would like to contact me confidentially on matters of misconduct or other sensitive information, please use this anonymous form: https://forms.gle/pb6NSo36trrk7Vkd6
Open PositionsThank you for your interest!PhD & Postdoc positions Please reach out with your resume, transcript of records, and a short motivation statement. At the moment, only scholarship-funded applicants are possible, e.g., through the DFG. Graduate and undergrad positions at UBC Since I moved to Bielefeld University in 2024, I am not able to take new students at UBC. You are welcome to apply in Germany (see above). |
 |
Publications
Check out Google Scholar/Rhodin for a complete list and statistics. |
Mirror-Aware Neural Humans
D Ajisafe, J Tang, S Su, B Wandt, H Rhodin
3DV 2024 *New* [paper pdf] [project page] [video] |
2023
 |
NPC: Neural Point Characters from Video
S Su, T Bagautdinov, H Rhodin
ICCV 2023 *New* [paper pdf] [project page] |
 |
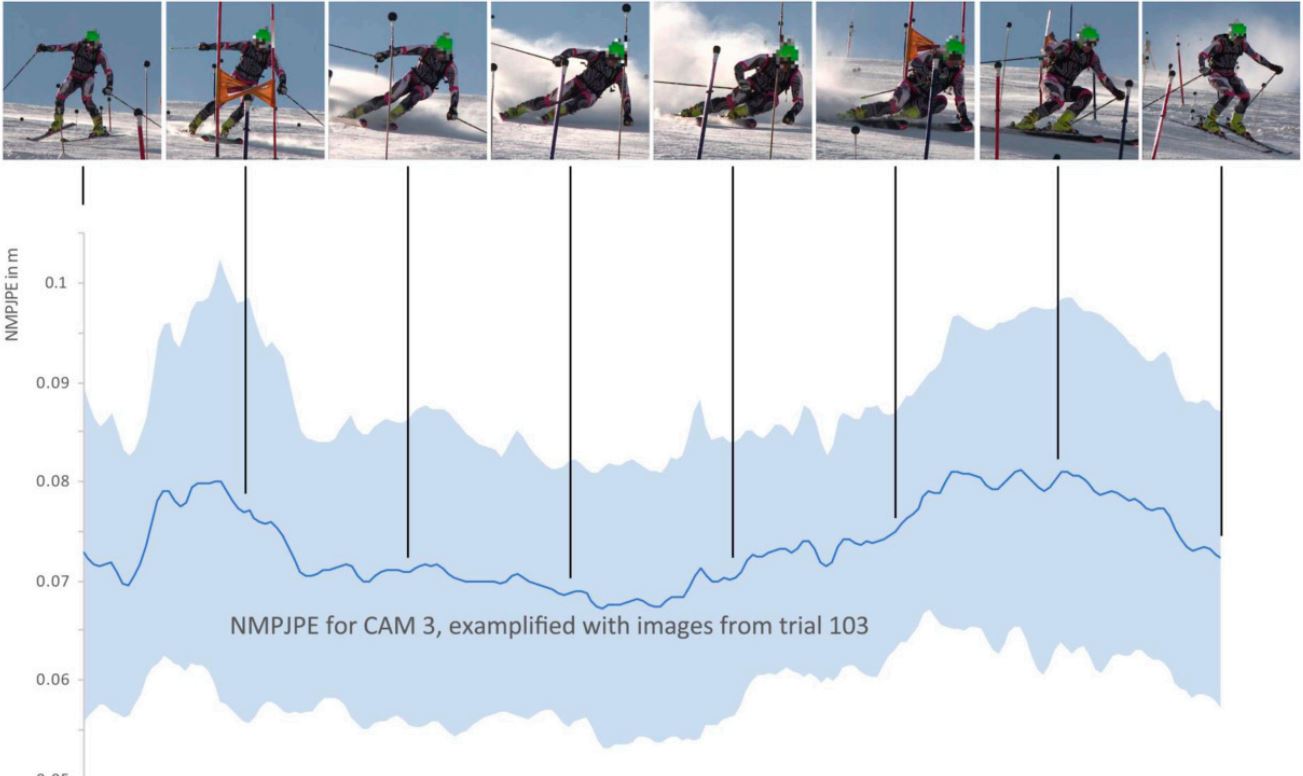
Deep learning-based 2D keypoint detection in alpine ski racing – A performance analysis of state-of-the-art algorithms applied to regular skiing and injury situations
M Zwolfer, D Heinrich, K Schindelwig, B Wandt, H Rhodin, J Spörri, W Nachbauer
JSAMS Plus *New* [paper pdf] |
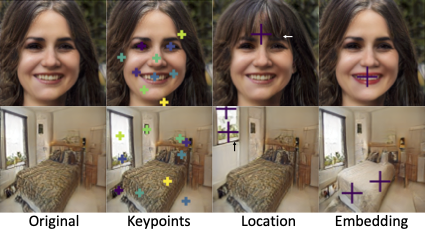 |
LatentKeypointGAN: Controlling GANs via Latent Keypoints
X He, B Wandt, H Rhodin
CRV 2023 (best paper award) [paper pdf] [video] |
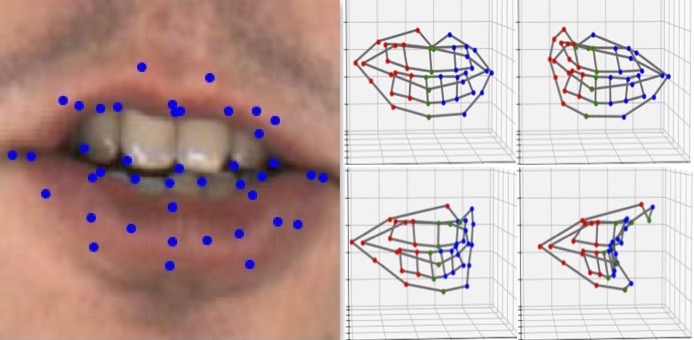 |
Few-shot Geometry-Aware Keypoint Localization
X He, G Bharaj, D Ferman, H Rhodin, P Garrido
CVPR 2023 [paper pdf] [project page] [video] |
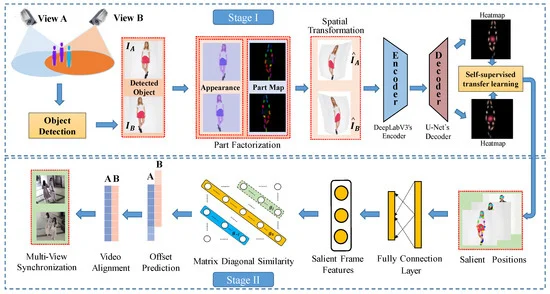 |
Learning Domain-Adaptive Landmark Detection-Based Self-Supervised Video Synchronization for Remote Sensing Panorama
L Mei, Y He, F J Fishani, Y Yu, L Zhang, H Rhodin
Remote Sensing [paper] |
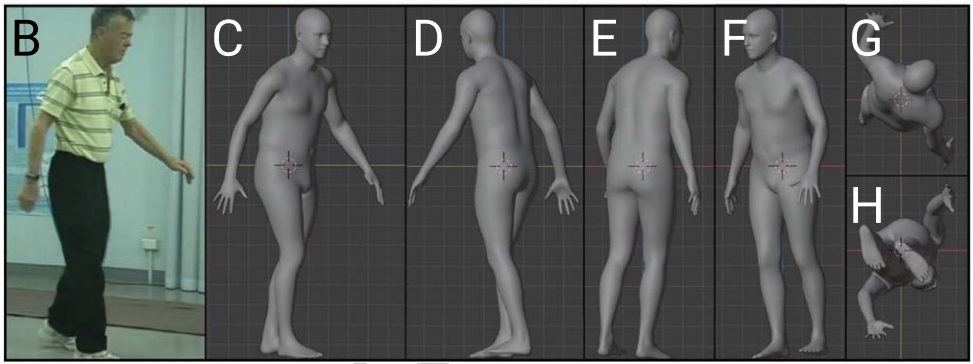 |
Towards a Visualizable, De-identified Synthetic Biomarker of Human Movement Disorders
H Hua, D Xiao, H Rhodin, T. H. Murphy
Journal of Parkinson’s Disease [paper pdf] |
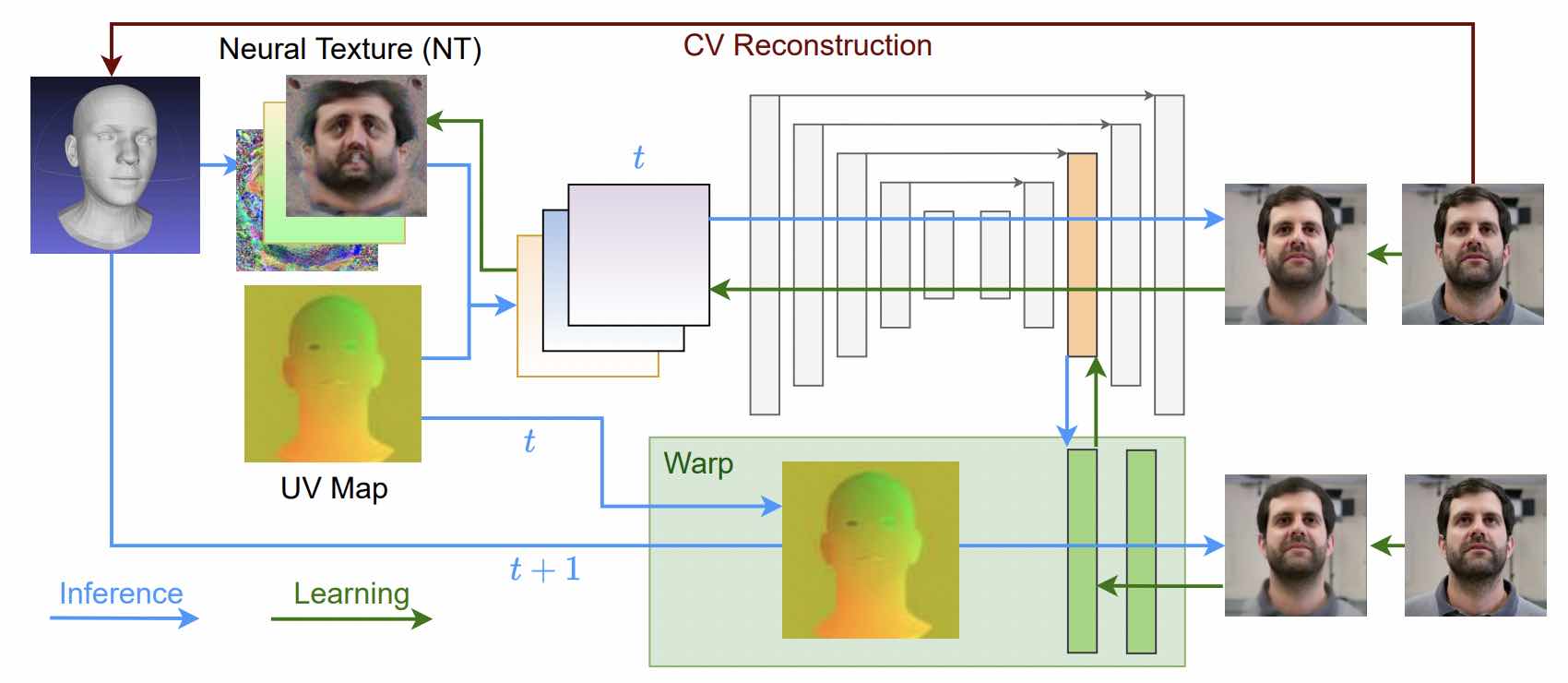 |
Scaling Neural Face Synthesis to High FPS and Low Latency by Neural Caching
F Yu, S Fels, H Rhodin
WACV 2023 [paper pdf] [project page] |
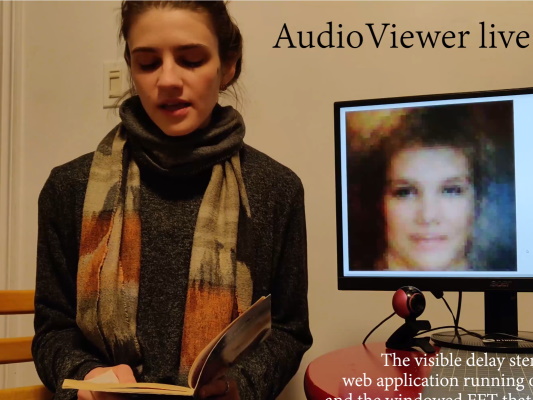 |
AudioViewer: Learning to Visualize Sound
C Song, Y Zhang, W Peng, P Mohaghegh, B Wandt, H Rhodin
WACV 2023 [paper pdf] |
2022
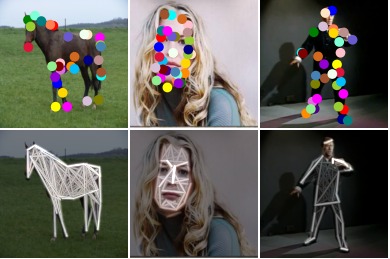 |
AutoLink: Self-supervised Learning of Human Skeletons and Object Outlines by Linking Keypoints
X He, B Wandt, H Rhodin
NeurIPS 2022 [paper pdf] [project page] |
 |
Temporal Representation Learning on Monocular Videos for 3D Human Pose Estimation
S Honari, V Constantin, H Rhodin, M Salzmann1, P Fua,
TPAMI 2022 [paper pdf] |
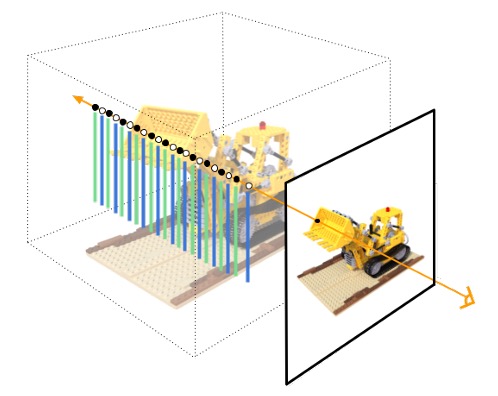 |
UNeRF: Time and Memory Conscious U-Shaped Network for Training Neural Radiance Fields
A Kuganesan, S Su, J Little, H Rhodin
arxiv 2022 [paper pdf] |
 |
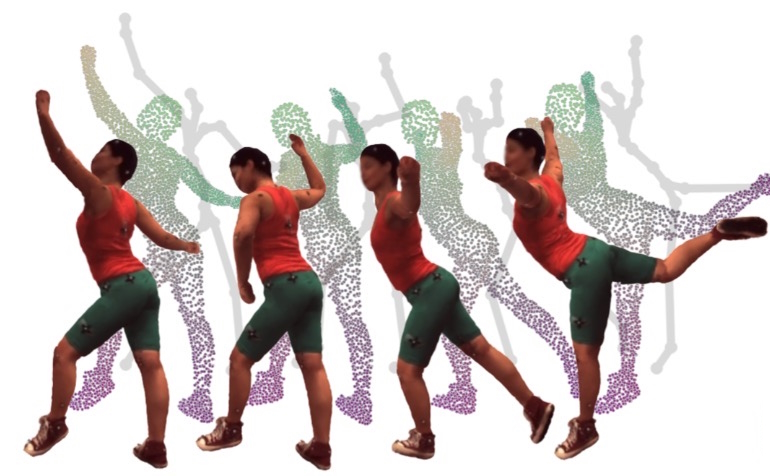
DANBO:Disentangled Articulated Neural Body Representations via Graph Neural Networks
S Su, T Bagautdinov, H Rhodin
ECCV 2022 [paper pdf] [project page] |
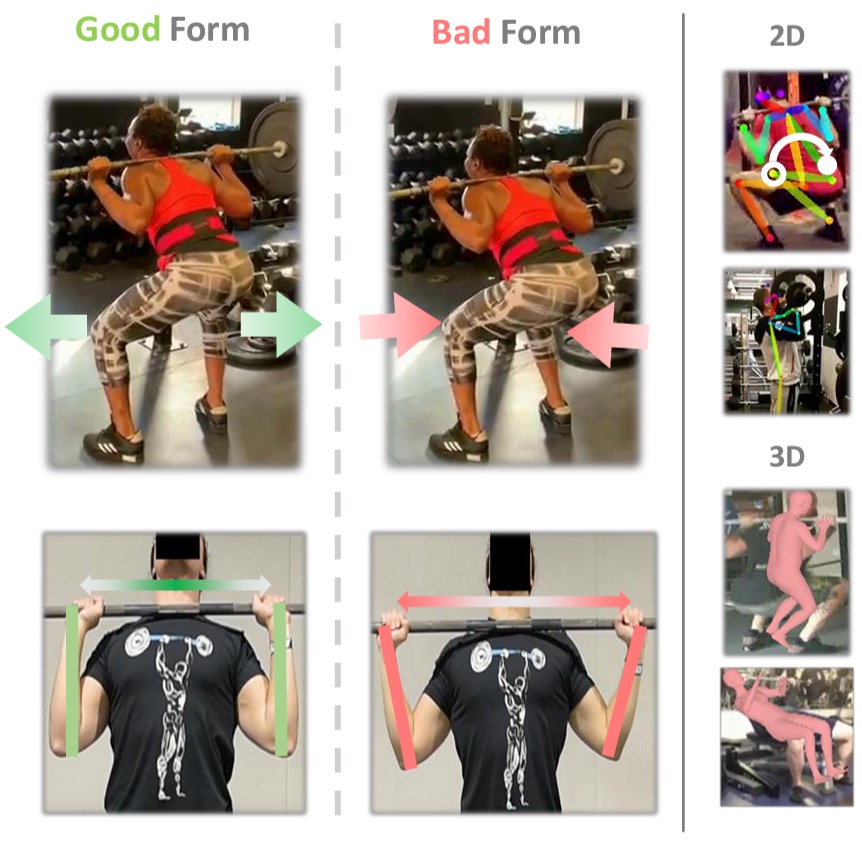 |
Domain Knowledge-Informed Self-Supervised Representations for Workout Form Assessment
P Parmar, A Gharat, H Rhodin
ECCV 2022 [paper pdf] |
 |
Detecting Viewer-Perceived Intended Vector Sketch Connectivity
J Yin, C Liu, R Lin, N Vining, H Rhodin, A Sheffer
SIGGRAPH 2022 [paper pdf] [project page] |
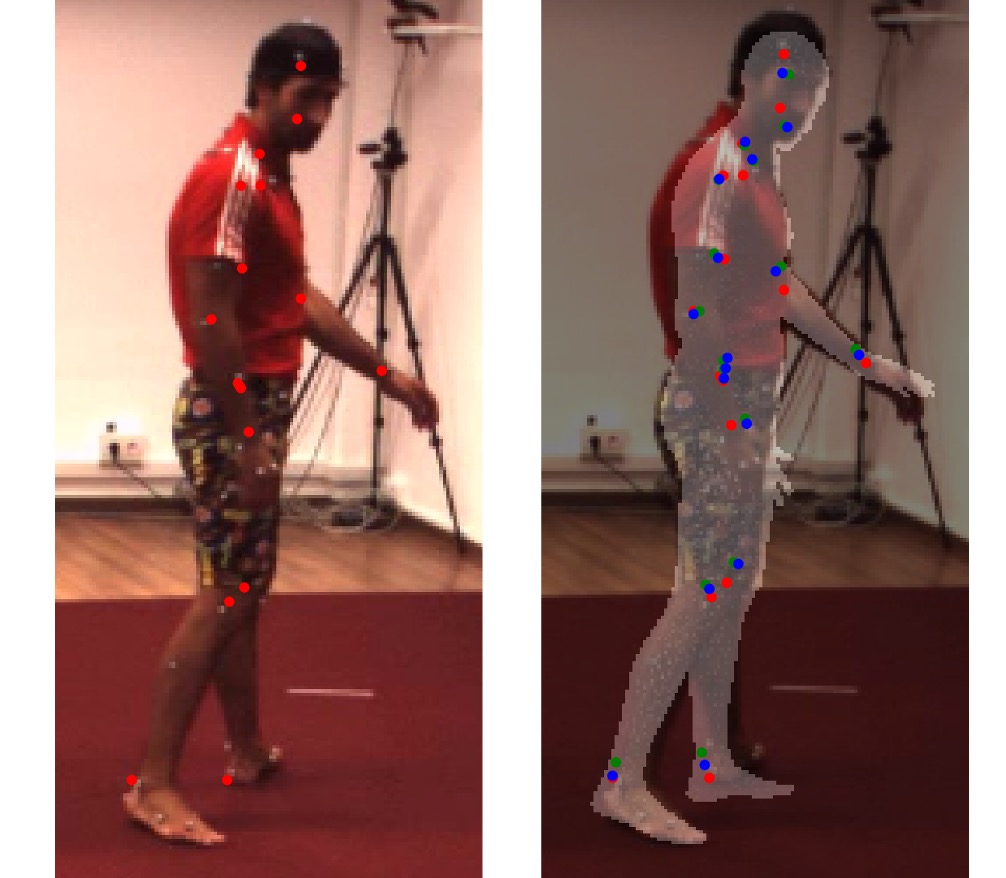 |
A Simple Method to Boost Human Pose Estimation Accuracy by Correcting the Joint Regressor for the Human3.6m Dataset
E Hedlin, H Rhodin, K M Yi
CRV 2022 [paper pdf] |
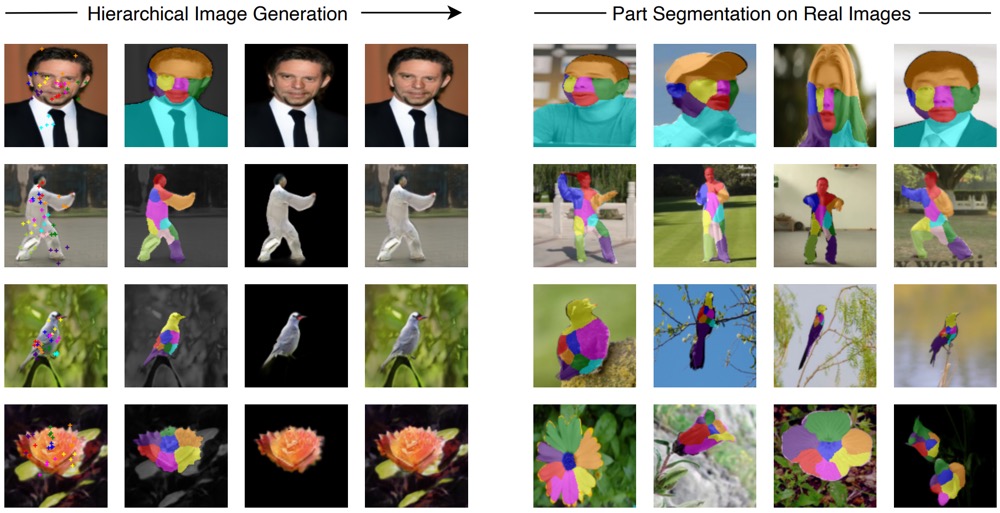 |
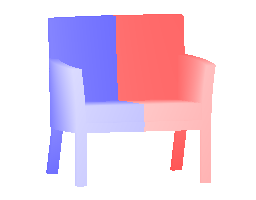
GANSeg: Learning to Segment by Unsupervised Hierarchical Image Generation
X He, B Wandt, H Rhodin
CVPR 2022 [paper pdf] |
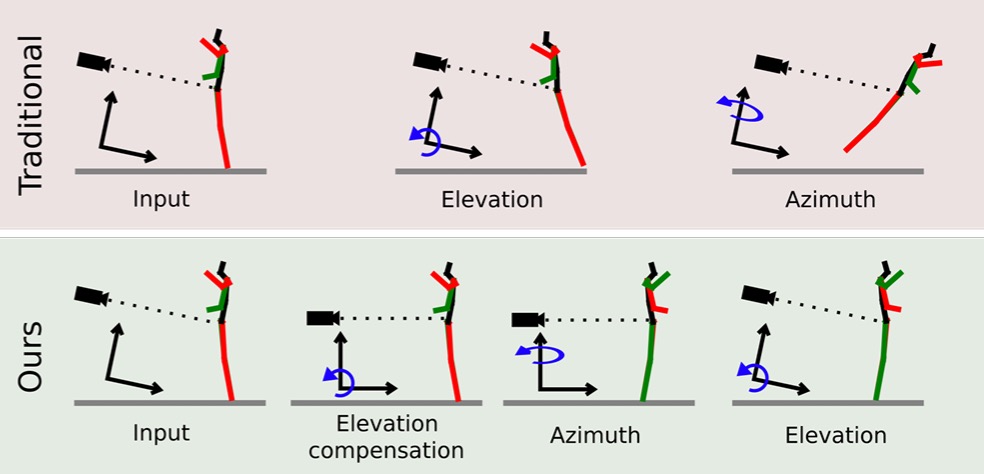 |
ElePose: Unsupervised 3D Human Pose Estimation by Predicting Camera Elevation and Learning Normalizing Flows on 2D Poses
B Wandt, J Little, H Rhodin
CVPR 2022 [paper pdf] [github code] |
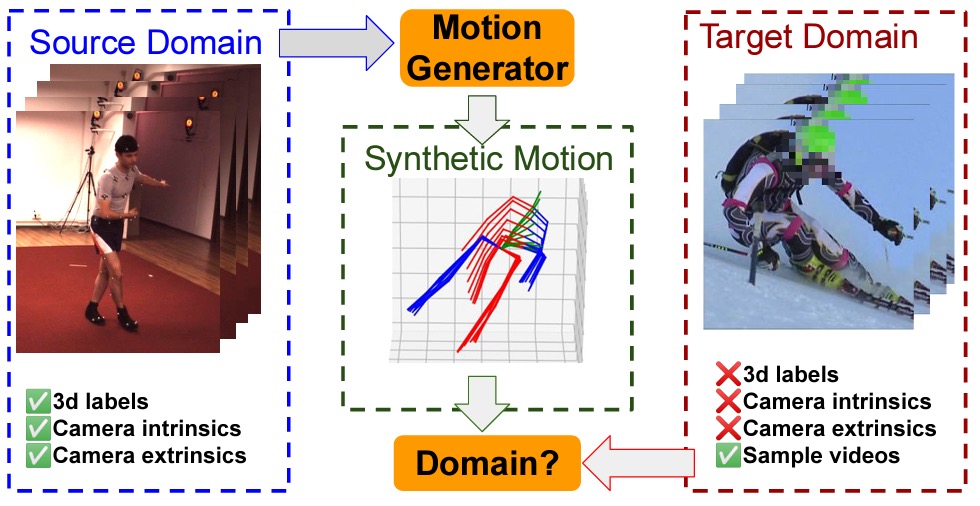 |
AdaptPose: Cross-Dataset Adaptation for 3D Human Pose Estimation by Learnable Motion Generation
M Gholami, B Wandt, H Rhodin, R Ward, ZJ Wang
CVPR 2022 [paper pdf] |
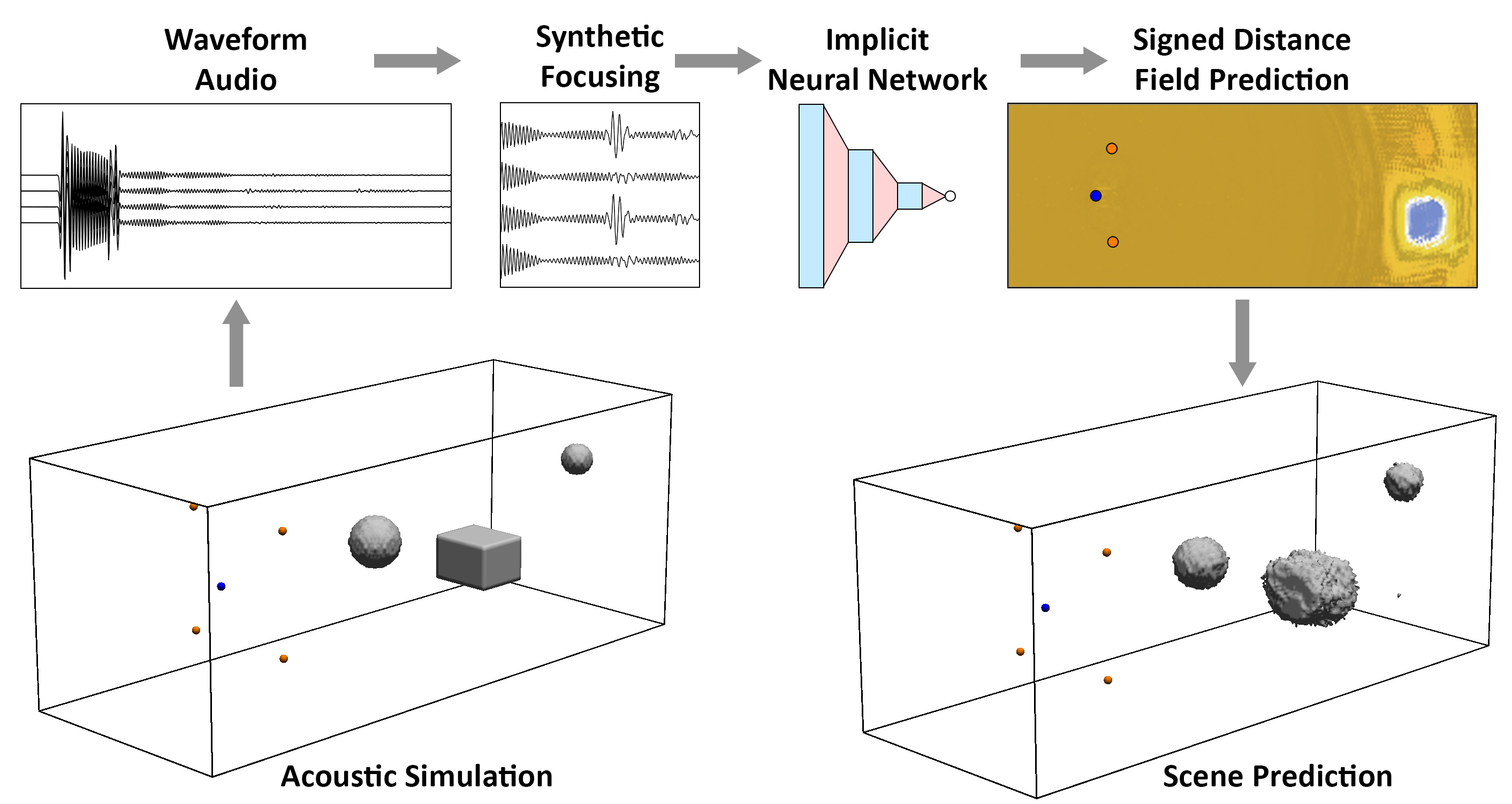 |
Learned Acoustic Reconstruction Using Synthetic Aperture Focusing
T Straubinger, R Xiao, H Rhodin
ICASSP 2022 [paper pdf] |
 |
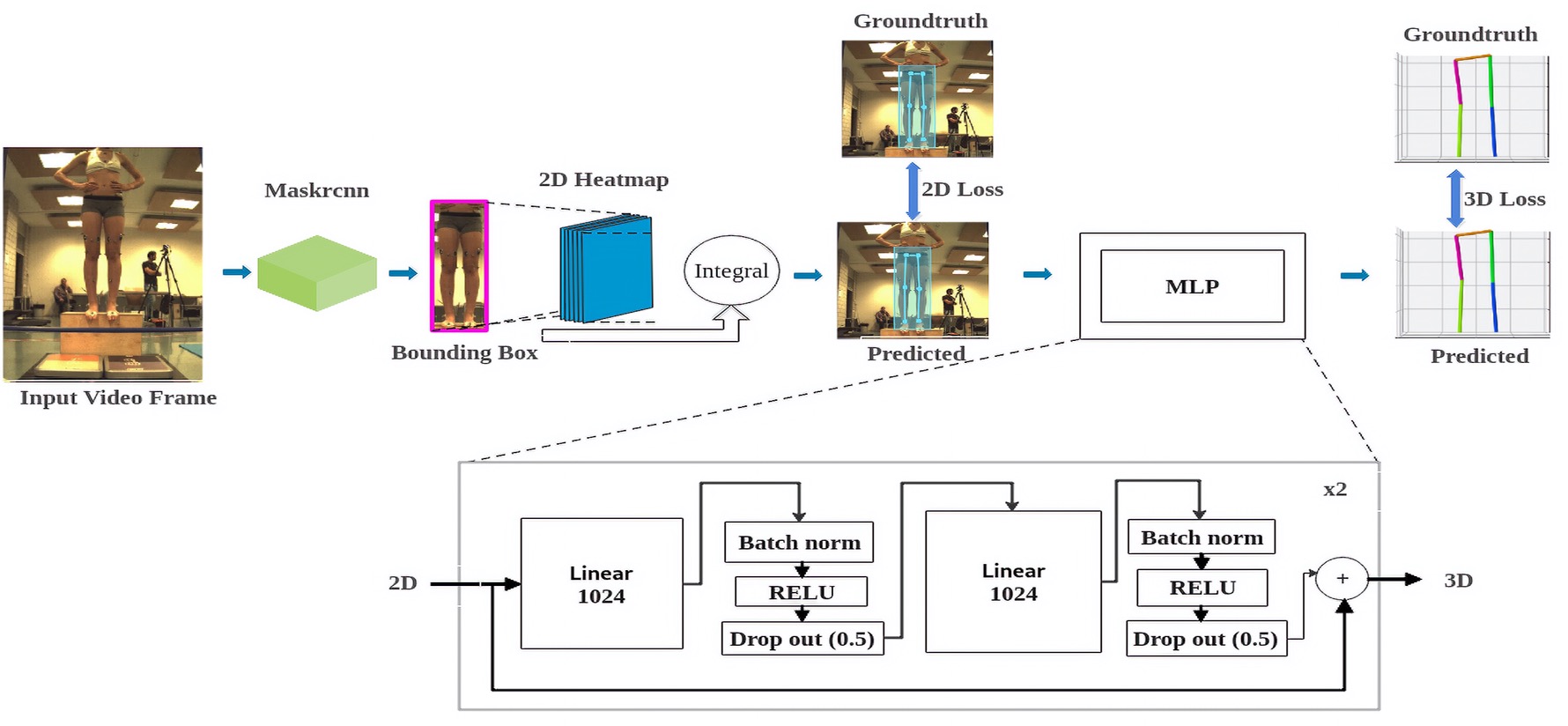
Self-supervised 3D human pose estimation from video
M Gholami, A Rezaei, H Rhodin, R Ward, ZJ Wang
Neurocomputing 2022 [paper pdf] |
 |
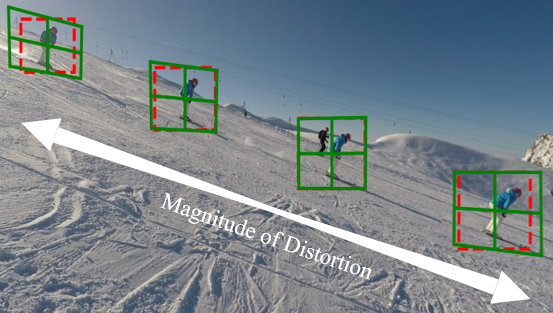
Improved 2D Keypoint Detection in Out-of-Balance and Fall Situations-Combining Input Rotations and a Kinematic Model
M Zwolfer, D Heinrich, K Schindelwig, B Wandt, H Rhodin, J Sporri, W Nachbauer
ACCV workshop 2022 [paper pdf] |
2021
 |
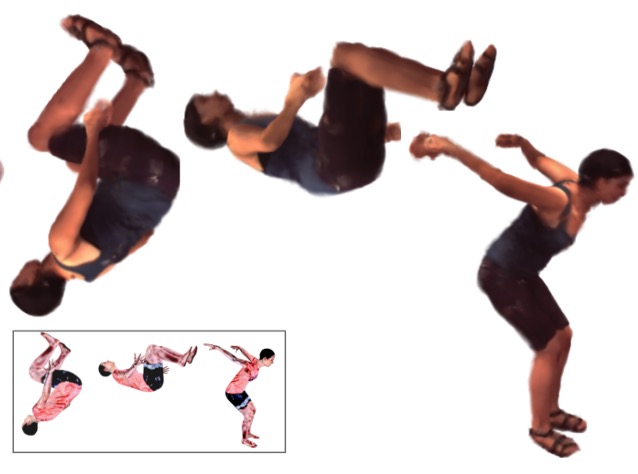
A-NeRF: Surface-free Human 3D Pose Refinement via Neural Rendering
S Su, F Yu, M Zollhoefer, H Rhodin
NeurIPS 2021 [paper pdf] [project page] [code] |
 |
Self-supervised Human Detection and Segmentation via Multi-view Consensus
I Katircioglu, H Rhodin, J Spörri, M Salzmann, P Fua
ICCV 2021 [paper pdf] |
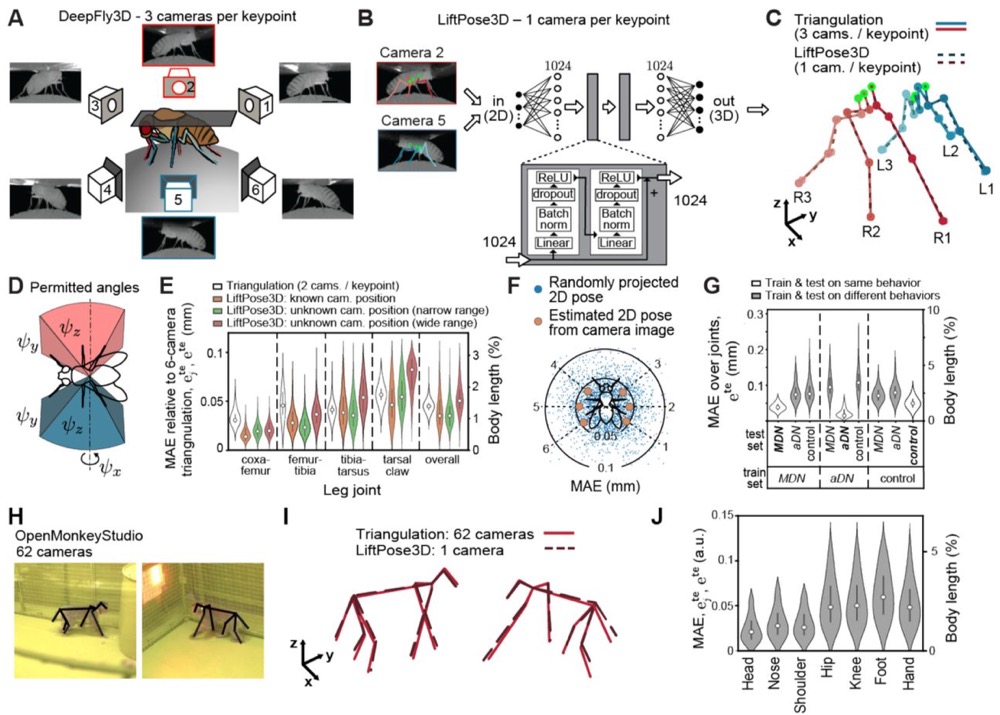 |
LiftPose3D, a deep learning-based approach for transforming two-dimensional to three-dimensional poses in laboratory animals
A Gosztolai, S Günel, V Lobato-Ríos, M Abrate, D Morales, H Rhodin, P Fua, P Ramdya
Nature Methods 2021 [paper] |
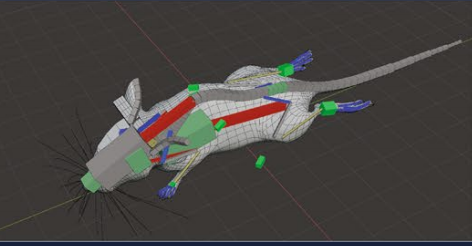 |
A three-dimensional virtual mouse generates synthetic training data for behavioral analysis
L Bolaños, D Xiao, N Ford, J LeDue, P Gupta, C Doebeli, H Hu, H Rhodin, T Murphy
Nature Methods 2021 [paper] |
 |
PCLs: Geometry-aware Neural Reconstruction of 3D Pose with Perspective Crop Layers
F Yu, M Salzmann, P Fua, H Rhodin
CVPR 2021 [paper pdf] |
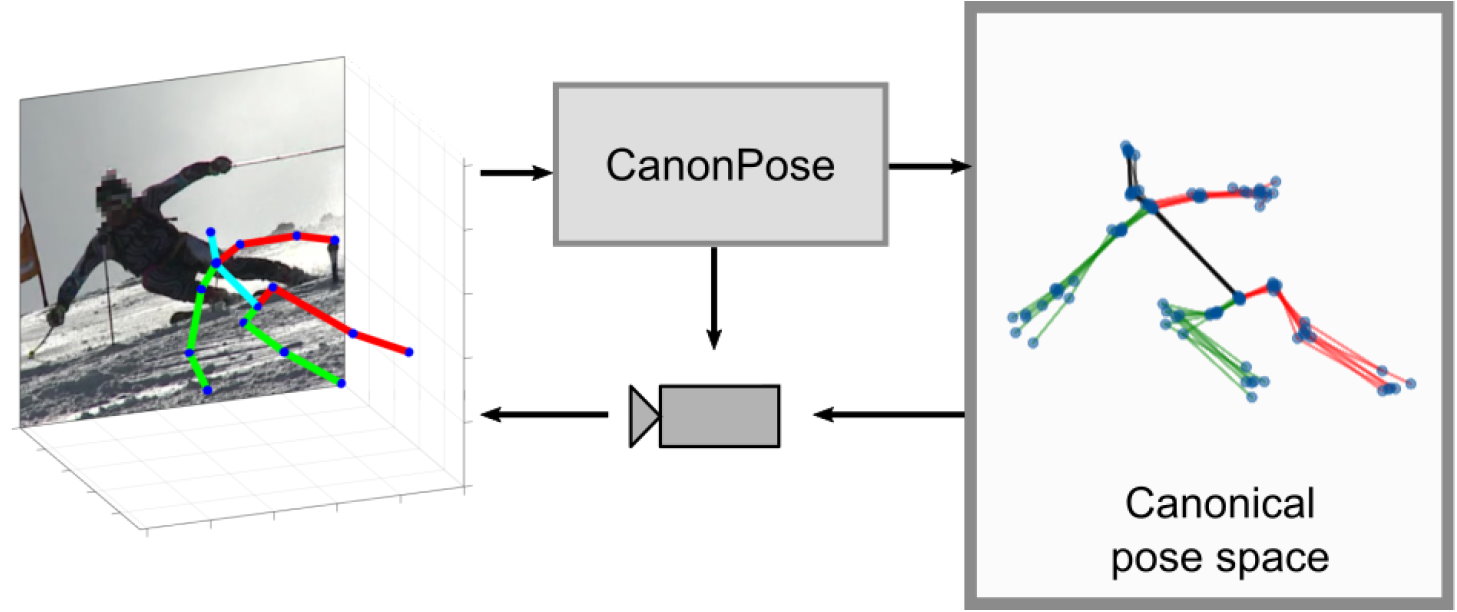 |
CanonPose: Self-Supervised Monocular 3D Human Pose Estimation in the Wild
B Wandt, M Rudolph, P Zell, H Rhodin, B Rosenhahn
CVPR 2021 [paper pdf] |
 |
Self-Supervised Human Detection and Segmentation via Background Inpainting
I Katircioglu, H Rhodin, V Constantin, J Spörri, M Salzmann, and P Fua
TPAMI 2021 [paper pdf] |
2020
| Deformation-aware Unpaired Image Translation for Pose Estimation on Laboratory Animals
Siyuan Li, Semih Günel, Mirela Ostrek, Pavan Ramdya, Pascal Fua, and Helge Rhodin
CVPR 2020 [paper pdf] |
|
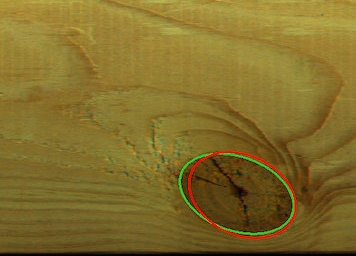 |
Ellipse Detection and Localization with Applications to Knots in Sawn Lumber Images
S Pan, S Fan, SWK Wong, JV Zidek, H Rhodin
WACV 2020 [paper pdf] |
 |
XNect: Real-time Multi-person 3D Human Pose Estimation with a Single RGB Camera
Dushyant Mehta, Oleksandr Sotnychenko, Franziska Mueller, Weipeng Xu, Mohamed Elgharib, Pascal Fua, Hans-Peter Seidel, Helge Rhodin, Gerard Pons-Moll, Christian Theobalt
SIGGRAPH 2020 [paper pdf] [Demo@CVPR19] [SelecSLS-Pytorch code] |
 |
Front2Back: Single View 3D Shape Reconstruction via Front to Back Prediction
Yuan Yao, Nico Schertler, Enrique Rosales, Helge Rhodin, Leonid Sigal, and Alla Sheffer
CVPR 2020 [paper pdf] |
 |
ActiveMoCap: Optimized Viewpoint Selection for Active Human Motion Capture
Sena Kiciroglu, Helge Rhodin, Sudipta Sinha, Mathieu Salzmann, Pascal Fua
CVPR 2020 (oral presentation) [paper pdf] |
 |
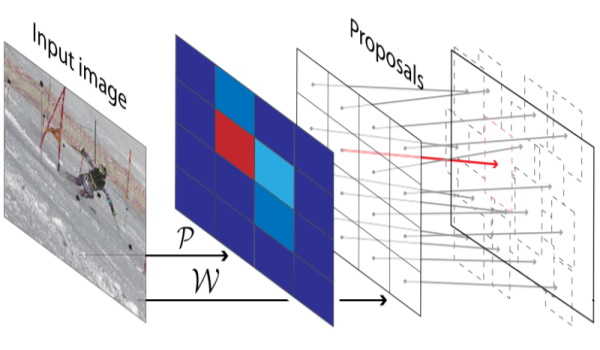
Towards end-to-end training of proposal-based 3D human pose estimation
Daniel Ajisafe, Joseph Domguia, James Tang, Lynn Ellenberger, Jörg Spörri, and Helge Rhodin
NeurIPS Workshop 2020 [paper pdf] |
2019
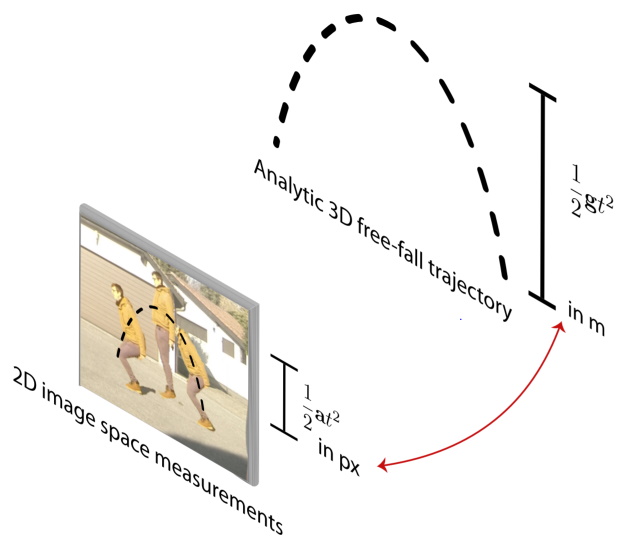 |
Gravity as a Reference for Estimating a Person's Height from Video
Didier Bieler, Semih Günel, Pascal Fua, and Helge Rhodin
ICCV 2019 [paper pdf] [video] |
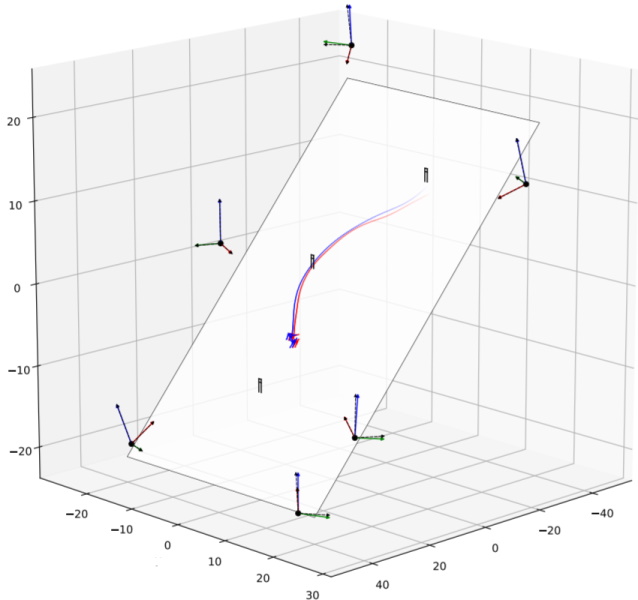 |
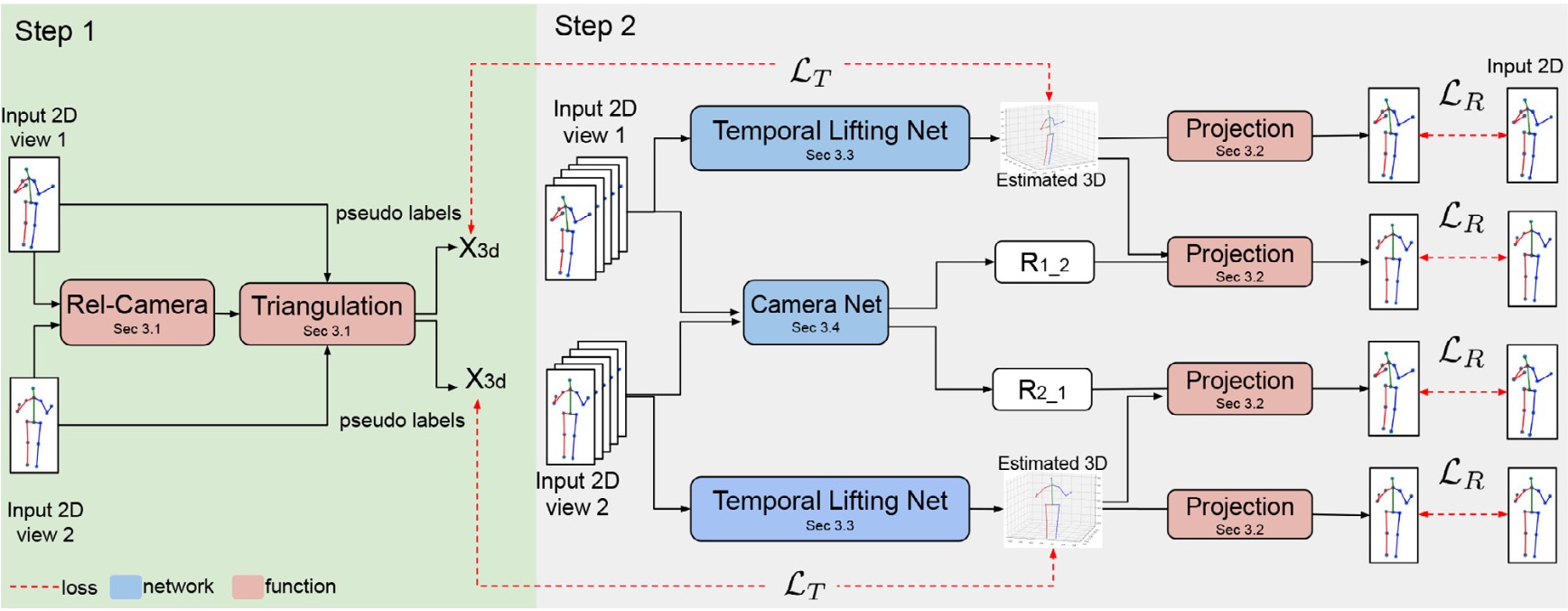
Motion Capture from Pan-Tilt Cameras with Unknown Orientation
Roman Bachmann, Jörg Spörri, Pascal Fua, and Helge Rhodin
3DV 2019 (oral presentation) [paper pdf] [2D ski pose dataset] |
 |
DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila
Semih Günel, Helge Rhodin, Daniel Morales, João H Campagnolo, Pavan Ramdya, Pascal Fua
eLIFE 2019 [paper pdf] |
 |
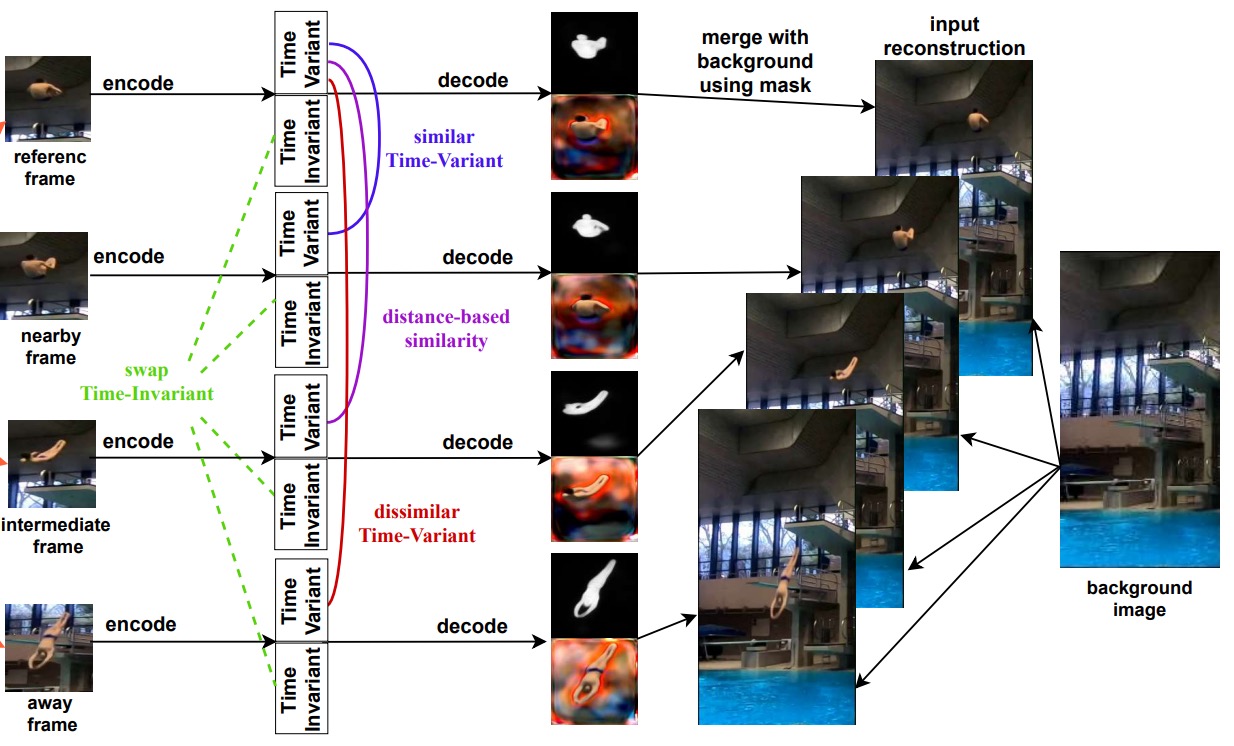
Neural Scene Decomposition for Multi-Person Motion Capture
Helge Rhodin, Victor Constantin, Isinsu Katircioglu, Mathieu Salzmann, and Pascal Fua
CVPR 2019 [paper pdf] [video] [code] |
 |
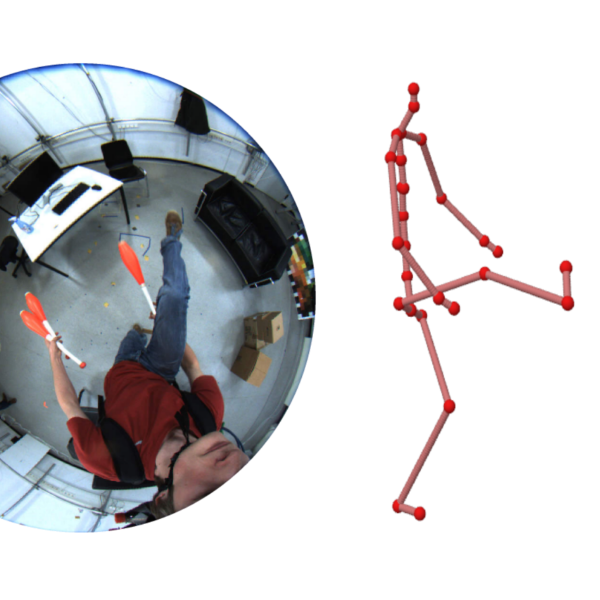
Mo2Cap2: Real-time Mobile 3D Motion Capture with a Cap-Mounted Fisheye Camera
Weipeng Xu, Avishek Chatterjee, Michael Zollhöfer, Helge Rhodin, Pascal Fua, Hans-Peter Seidel, and Christian Theobalt TVCG 2019 (IEEE VR) Best Journal Paper Honorable Mention Award [paper pdf] [video and project page] |
 |
Are Existing Monocular Computer Vision-Based 3D Motion Capture Approaches Ready for Deployment? A Methodological Study on the Example of Alpine Skiing
Mirela Ostrek, Helge Rhodin, Pascal Fua, Erich Müller, and Jörg Spörri
Sensors 2019 [paper pdf] |
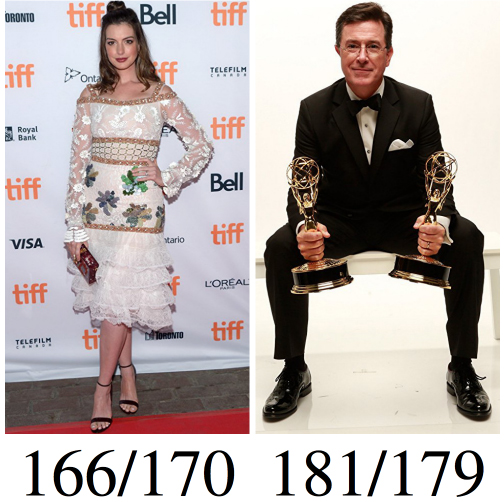 |
What Face and Body Shapes Can Tell About Height
Semih Günel, Helge Rhodin, and Pascal Fua ICCV Workshops. 2019 [paper pdf] |
2018
 |
NRST: Non-rigid Surface Tracking from Monocular Video
Marc Habermann,
Weipeng Xu,
Helge Rhodin,
Michael Zollhoefer,
Gerard Pons-Moll, and
Christian Theobalt
GCPR 2018 (oral presentation) |
 |
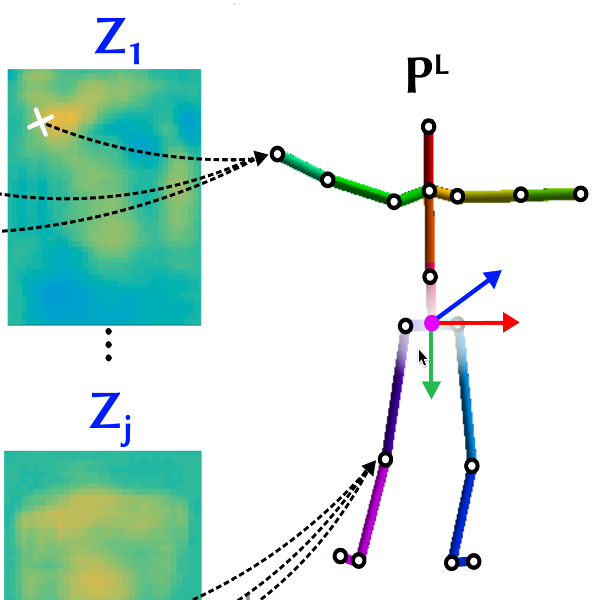
Unsupervised Geometry-Aware Representation Learning for 3D Human Pose Estimation
Helge Rhodin, Mathieu Salzmann, and Pascal Fua ECCV 2018 (oral presentation) [paper pdf] [project page] [video] [code] |
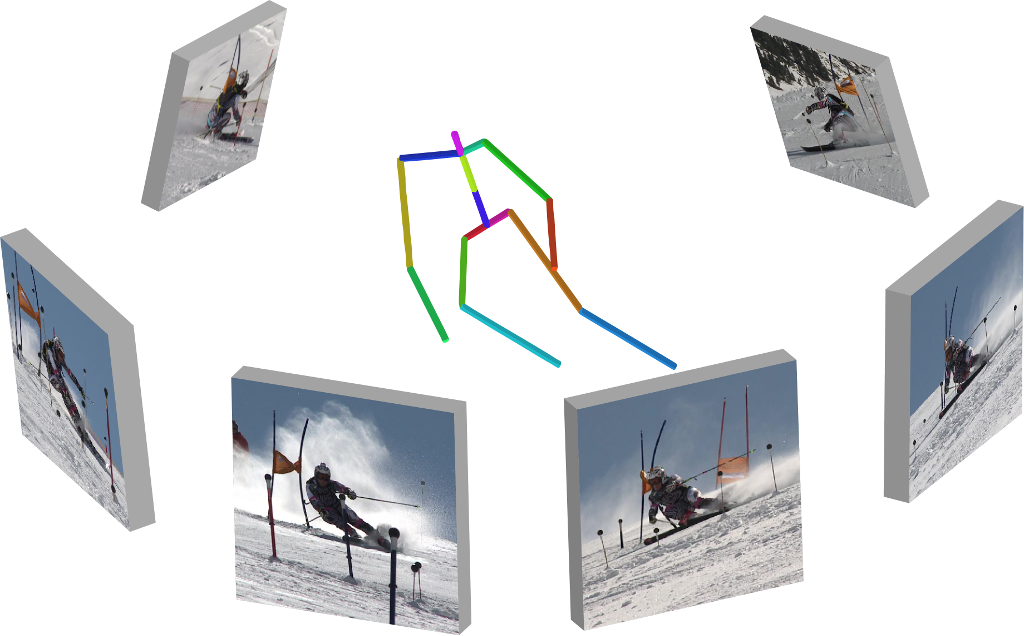 |
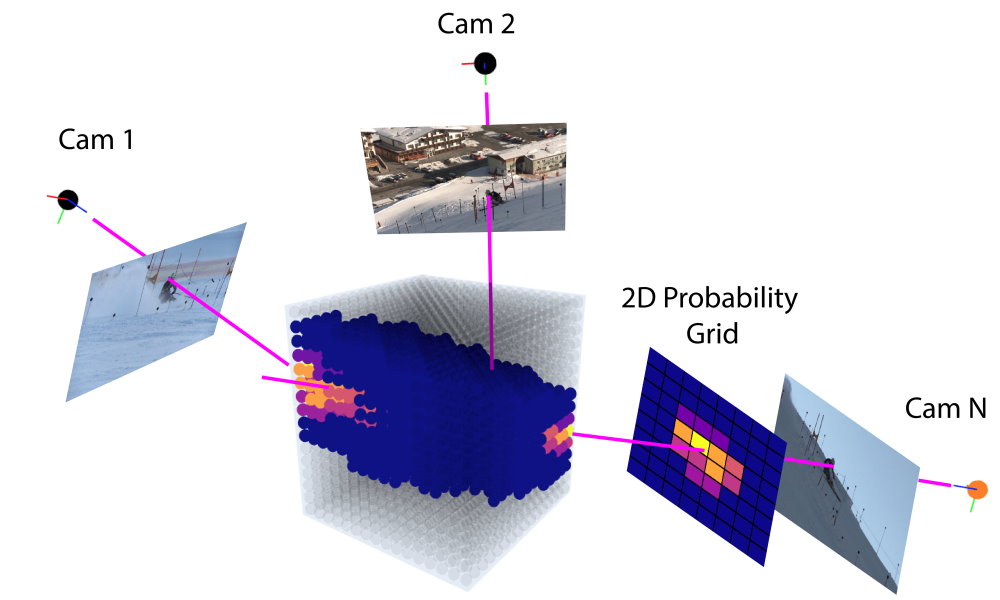
Learning Monocular 3D Human Pose Estimation from Multi-view Images
Helge Rhodin, Jörg Spörri, Isinsu Katircioglu, Victor Constantin,
Frédéric Meyer, Erich Müller, Mathieu Salzmann, and Pascal Fua CVPR 2018 (spotlight presentation) [paper pdf] [project page] [video] |
 |
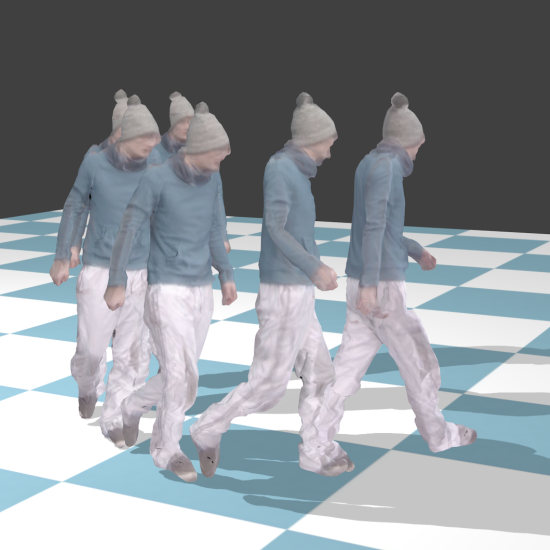
MonoPerfCap: Human Performance Capture from Monocular Video
Weipeng Xu, Avishek Chatterjee, Michael Zollhöfer, Helge Rhodin, Dushyant Mehta, Hans-Peter Seidel, and Christian Theobalt TOG 2018 (oral presentation at SIGGRAPH 2018) [paper pdf] [project page] [video] |
2017
| Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision
Dushyant Mehta, Helge Rhodin, Dan Casas, Pascal Fua, Oleksandr Sotnychenko, Weipeng Xu, and Christian Theobalt 3DV 2017 (oral presentation) [paper pdf] [dataset] |
|
 |
VNect: Real-time 3D Human Pose Estimation with a Single RGB Camera
Dushyant Mehta, Srinath Sridhar, Oleksandr Sotnychenko, Helge Rhodin, Mohammad Shafiei, Hans-Peter Seidel, Weipeng Xu, Dan Casas, and Christian Theobalt
SIGGRAPH 2017 (oral presentation) [project page] [paper pdf] [video] [CVPR 2017 demo project page] |
2016
 |
From Motion Capture to Interactive Virtual Worlds
Towards Unconstrained Motion-capture Algorithms for Real-time Performance-driven Character Animation
Helge Rhodin PhD Dissertation, Saarland University, 2016 [thesis pdf] |
 |
EgoCap: Egocentric Marker-less Motion Capture with Two Fisheye Cameras
Helge Rhodin, Christian Richardt, Dan Casas, Eldar Insafutdinov, Mohammad Shafiei, Hans-Peter Seidel, Bernt Schiele, and Christian Theobalt SIGGRAPH Asia 2016 (oral presentation) [project page] [dataset] [paper pdf] [video] |
 |
Model-based Outdoor Performance Capture Nadia Robertini, Dan Casas, Helge Rhodin, Hans-Peter Seidel, and Christian Theobalt 3DV 2016 [project page] [paper pdf] [video] |
 |
General Automatic Human Shape and Motion Capture Using Volumetric Contour Cues Helge Rhodin, Nadia Robertini, Dan Casas, Christian Richardt, Hans-Peter Seidel, and Christian Theobalt ECCV 2016 (spotlight presentation) [project page] [paper pdf] [video] |
2015
 |
A Versatile Scene Model with Differentiable Visibility Applied to Generative Pose Estimation Helge Rhodin, Nadia Robertini, Christian Richardt, Hans-Peter Seidel, and Christian Theobalt ICCV 2015 [project page] [paper pdf] [video] |
 |
Generalizing Wave Gestures from Sparse Examples for Real-time Character Control Helge Rhodin, James Tompkin, Kwang In Kim, Edilson de Aguiar, Hanspeter Pfister, Hans-Peter Seidel, and Christian Theobalt SIGGRAPH Asia 2015 (oral presentation) [project page] [paper pdf] [video] |
2014
| Real-time Hand Tracking Using a Sum of Anisotropic Gaussians Model Srinath Sridhar, Helge Rhodin, Hans-Peter Seidel, Antti Oulasvirta, and Christian Theobalt 3DV 2014 (oral presentation) [project page] [paper pdf] [video] |
|
 |
Interactive Motion Mapping for Real-time Character Control Helge Rhodin, James Tompkin, Kwang In Kim, Kiran Varanasi, Hans-Peter Seidel, and Christian Theobalt Eurographics 2014 (oral presentation) [project page] [paper pdf] [video] |
2013 and before
 |
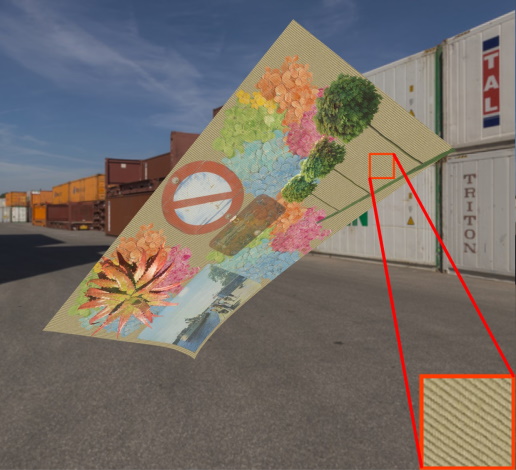
A Mathematically Justified Algorithm for Shape from Texture
Helge Rhodin and Michael Breuß SSVM 2013 |
 |
A PTX Code Generator for LLVM
Helge Rhodin B.Sc. Thesis, Saarland University, 2010. [project page] [thesis pdf] |
 |
AnySL
The goal of AnySL is the development of a unified shading system that is independent of source language, target architecture and rendering engine without sacrificing runtime performance. My focus was on the GPU code generation. The AnySL project is joined work of the Compiler Design Lab of Prof. Sebastian Hack and the Computer Graphics Group of Prof. Philipp Slusallek. |
 |
Roboking Competition
As Team Hamburg we were able to win twice the international Roboking competition hosted by the Chemnitz University of Technology. The goal was to construct and program an autonomous robot capable of fulfilling the given objectives without human intervention. The team was mentored by Andreas Rhodin and consisted of Julian Bende, Paul Bröker, Daniel Reck, and Helge Rhodin. |
Team
The team composition is constantly evolving. This is a snapshot from Jun 2023.Lead
|
|


Graduate
|
|
|
|
|||||
|
|
|
|








Undergraduate
|
|


Alumni
James Tang (MSc).Frank Yu (MSc) started a Research Engineer at Meta, US.
Seungyeon Baek (BSc) started a MSc at UBC.
Terry Zhan (BSc).
Eddie Pokming Sheung (BSc).
Abi Kuganesan (MSc) started a Machine Learning Engineer at Quora, Canada.
Jerry(Deyu) Liu (BSc) started a MSc at University of Toronto, Canada.
Emily Jia (BSc) started a Software Engineer at Twilio, Canada.
Bastian Wandt (Postdoc) started a tenure-track Assistant Prof. at Linköping University, Sweden.
Paritosh Parmar (Postdoc) started at the Agency for Science, Technology and Research, Singapore.
Parmis Mohaghegh (BSc) started at MDA Ltd. (space technology), Canada.
Matthew Tang (BSc) started a MSc at UBC.
Tim Straubinger (MSc, co-supervision Robert Xiao) started at Industrial Light and Magic (ILM), Vancouver, Canada.
Eric Hedlin (MSc, co-supervision Kwang Mo) started a PhD at UBC.
Yuchi Zhang (MSc) started at Aupera Technologies, Canada.
Farnoosh Javadi (MSc, co-supervision Jim Little) started at Huwei Canada.
Yizhuo (Joyce) He (BSc) started a MSc at Carnegie Mellon University (CMU)
Willis Peng (BSc) started at TextIQ (now acquired by Relativity)
Jiajun Zha (visiting BSc) started a MSc at the Australian National University (ANU)
Ling Mei (visiting PhD)
Xinyi Zhou (visiting BSc)
Roark Zhang (BSc)
Teaching
 |
CPSC 427: Video Game Programming Lecturer: Helge Rhodin |
 |
CPSC 532R/533R: Visual AI - Deep Learning for Computer Vision and Graphics Lecturer: Helge Rhodin |
 |
Visual AI for Humans - School outreach Lecturer: Helge Rhodin, Daniel Ajisafe, Abi Kuganesan, Tim Straubinger, Bastian Wandt |
 |
EPFL CS 328: Numerical Methods for Visual Computing Lecturer: Wenzel Jakob and Helge Rhodin |
 |
MPI / Saarland University: Computer Vision for Computer Graphics Seminar Lecturer: Christian Theobalt, Christian Richardt and Dan Casas. TAs: Helge Rhodin and others. |